Robotics is the branch of artificial intelligence concerned with the study of robots, automatically guided machines which are able to carry out tasks and functions on their own. Robotics covers a wide spectrum of areas including the design, construction, operation and manufacture of robots.
Linux plays an important role in powering robots. There are many notable examples of Linux in action in the robotics world. For example Nasa’s space exploration robot K10, which can be remotely operated on planetary surfaces, runs on custom, embedded software on a dual-core Linux laptop. Another impressive robot is the humanoid robot, HOAP-1, in which RTLinux has been deployed by Fujitsu. Also worthy of a mention is the Katana Robotic arm, which comes with an embedded controlboard running Linux 2.4.25 with Xenomai Hard Real Time extensions.
Building a robot can require considerable expertise and creativity given that it involves skills from many disciplines such as hardware design, control systems design, mechanical design, as well as embedded firmware and sensor selection. Moreover, building robots can be expensive as there are many different parts to purchase including electronics, sensors, and microcontroller parts. One important way to keep the development costs to a minimum is by using simulation environments. These provide an inexpensive way to test and measure the robotics algorithms, and at the same time encourage experimentation.
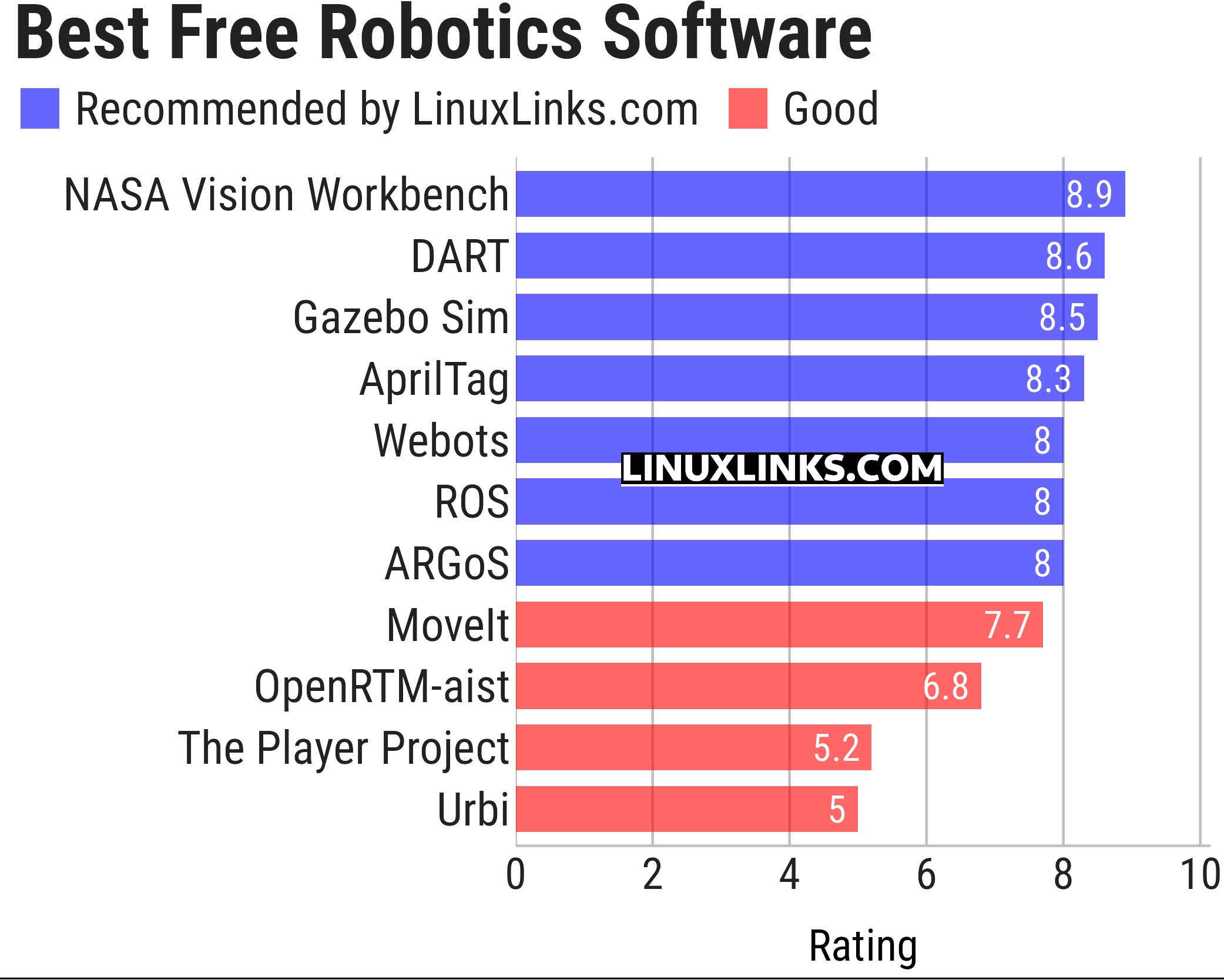
Linux has a good range of open source toolkits for building robotic control systems. To provide an insight into the open source software that is available, we have compiled a list of 11 of our favorite robotics software. Hopefully, there will be something of interest here for anyone who wants to conduct research in robot systems. Here’s our verdict captured in a legendary LinuxLinks-style ratings chart.
Click the links in the table below to learn about each of the robotics programs.
| Robotics Software | |
|---|---|
| NASA Vision Workbench | Image processing in the context of machine vision |
| DART | Dynamic Animation and Robotics Toolkit |
| Gazebo Sim | Robot simulation made easy |
| AprilTag | Visual fiducial system popular for robotics research |
| Webots | Multi-platform desktop application used to simulate robots |
| ROS | Software framework for building robot applications |
| ARGoS | Physics-based simulator designed to simulate robot swarms |
| MoveIt | Robotic manipulation platform for ROS 2 |
| OpenRTM-aist | Component-oriented development of robot systems |
| The Player Project | Cross-platform robot device interface & server |
| Urbi | Universal Robot Body Interface |
This article has been updated to reflect the changes outlined in our recent announcement.
 Explore our comprehensive directory of recommended free and open source software. Our carefully curated collection spans every major software category. Explore our comprehensive directory of recommended free and open source software. Our carefully curated collection spans every major software category.This directory is part of our ongoing series of informative articles for Linux enthusiasts. It features hundreds of detailed reviews, along with open source alternatives to proprietary solutions from major corporations such as Google, Microsoft, Apple, Adobe, IBM, Cisco, Oracle, and Autodesk. You’ll also find interesting projects to try, hardware coverage, free programming books and tutorials, and much more. Know a useful open source Linux program that we haven’t covered yet? Let us know by completing this form. |
Please read our Comment Policy before commenting.
Where’s ROS?
Last time I saw her was at KACL